EL-N-2
Dual GNSS/INS navigation system
EL-N-2
Dual-antenna INS/GNSS navigation unit with moving-baseline GNSS heading for static and low-speed heading observability.
EL-N-2 is a compact MEMS INS/GNSS navigation system based on a 3-axis IMU, dual GNSS receiver configuration, DMC (Digital Magnetic Compass) and sensor fusion firmware.

Dual GNSS
Moving baseline GNSS heading support
Heading
GNSS moving-baseline, COG (course over ground) and DMC
RTK
Support for improved positioning accuracy
I/O
USB, RS232, digital inputs and digital output
Installation / Integration
The embedded sensor-fusion firmware processes IMU and dual-GNSS data and outputs real-time PVA data to the host system. The moving-baseline GNSS configuration adds a heading source that is available during static or low-speed operation when the baseline solution is valid. When connected to the CDV software app, data visualization and logging are also available.
Installation
- Rigid mounting to the host structure
- User defined device orientation relative to the host frame
- User defined dual GNSS baseline relative to the host platform
- Two external GNSS antenna connections
- Power / data cable connection with the host platform
Host integration
- Device configuration using CDV software app
- Data logging for post-test analysis
- RTK correction input from the host
- Dual GNSS heading status and baseline diagnostics
- Integration support through data protocol and example parsing code (C, Python)
Navigation outputs
The CDV software app allows the user to select output content and output data rate. Data is sent to the host platform using proprietary binary protocol.
Data types
- Attitude: Euler angles, quaternions, DCM
- Latitude, longitude and altitude
- Body frame velocity
- Bias compensated acceleration and angular rate data
- GNSS position, velocity and timing data
- Dual GNSS heading and baseline status data
Diagnostic and status data
- GNSS fix type and RTK status
- GNSS quality indicators
- Dual GNSS heading status
- Navigation status flags
- Timestamped output for logging
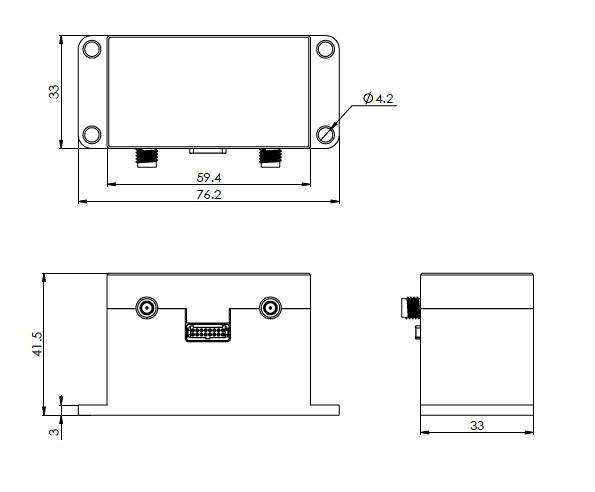
Mechanical dimensions
Specifications
| Attitude accuracy - static | 0.05–0.1° (RMS)1 |
| Attitude accuracy - dynamic | 0.2–0.4° (RMS)2 |
| GNSS Dual Heading accuracy | 0.4° (RMS)3 |
| GNSS (COG) Heading accuracy | < 1° (RMS)4 |
| DMC Heading accuracy | 2° (RMS)5 |
| Position accuracy - GNSS | 1.5 m CEP horizontal / 2.0 m vertical6 |
| Velocity accuracy | 0.05 m/s |
| Output data rate | User defined, up to 200 Hz |
| Serial baud rate | Up to 921600 bps |
| Gyroscope bias stability | 8 deg/h |
| Gyroscope dynamic range | ± 2000 °/s |
| Gyroscope ARW | 0.34 °/√hr |
| Accelerometer range | 40 g |
| IMU data output rate | 2 kHz |
| Supported constellations | GPS, GLONASS, Galileo, BeiDou |
| RTK correction | Supported, data provided by the host platform |
| Communication interface | USB, RS232, digital inputs (2x), digital output |
| Main connector | Harwin G125-FV11605L0R |
| Supply voltage | 5 - 36 V |
| Enclosure | Anodized Al enclosure |
| Dimensions | 76.2 x 33 x 41.5 (mm) - L x W x H |
| Mass | 98 g |
| Operating temperature | −40°C to +85°C |
For more information, contact:
info@eloptris.rs